

О стадии НИОКР
Вероятно как и многие другие компании в России, мы начинали наш путь с научной работы - НИОКР, поддержанной Фондом содействия инновациям (Фонд Бортника)
При выполнении обследования автомобильных дорог методом георадиолокации, мы часто сталкивались со сложными инженерными задачами при обработке георадарных данных. К примеру, это могло быть назначение скважины по данным радарограммы и позиционирование её на местности, обработка больших объемов данных в части выделения границ уложенных слоев дорожной конструкции, или выявление на радарограммах неоднородностей (деструктивных процессов)
Мы знали о проблемах обследований автомобильных дорог с применением геофизического прибора - георадара (подробнее о технологии и принципах работы устройства можно ознакомиться на странице Основы георадиолокации). Так, обработка радарограмм (данных, полученных сканированием подповерхностной структуры георадаром) с подготовкой отчетов занимала много времени - не меньше 1 месяца при работе с участком, протяженностью в 15-20 км, а то и вообще отсутствовала техническая возможность получения такой специфической информации, как, например, толщина конструктивного слоя в координатной и пикетной привязке, или локализация неоднородностей, скважин в сопоставлении с радарограммой
В развитых странах метод георадиолокации сегодня находит широкое применение. Программы для обработки георадарных данных содержат широкий функционал для работы с георадарным проектом. Вместе с этим, мы провели маркетинговое исследование, и определили, что большинство зарубежных продуктов либо привязаны опционально к конкретному оборудованию (георадару), либо весьма дорогостоящи и непонятны российскому пользователю. В то же время, комплекты (георадар + софт) отечественных разработчиков, как правило, не содержат того объема функционала, который необходим для работы с георадарным проектом на объектах дорожного строительства
Для создания своего программного обеспечения, универсального, с широким функционалом для работы с проектом георадарного сканирования дороги на каждой стадии её жизненного цикла, необходимы были ресурсы - программист и базовое программное обеспечение для дальнейших разработок
Сооснователи компании «ТИМ» - Ерёмин Роман и Юрий Сухобок (автор ПО GeoReader) познакомились на конференции «Георадар-2017» и там же договорились впервые о дальнейших разработках, в направлениях которых Роман и Юрий были полностью согласны, как опытные георадарщики и научные деятели дорожной отрасли. Так базой для дальнейших разработок выбрано программное обеспечение GeoReader
Юрий начал разработки первых версий программ для обработки георадарных данных ещё с момента своего первого знакомства с языком программирования Python - примерно с середины 2013 года. До 2017 года программа GeoReader была составлена в виде отдельных простейших математических функций, написанных на "питоне". И уже в 2017 году представляется первая возможность повышения уровня ПО - Юрий воспользовался программой Фонда содействия инновациям и принял участие в программе "УМНИК". В результате, в течение года был создан и зарегистрирован в Роспатенте первый программный продукт GeoReader:


Первый GeoReader поддерживал небольшой набор функций для открытия и работы с георадарными данными, тем не менее, уже были реализованы алгоритмы компьютерного зрения и цифровой обработки сигналов, поддержка форматов данных различных георадаров, экспорт результатов интерпретации георадарных профилей в различные форматы с открытой спецификацией (в том числе для обмена данными с САПР, и ГИС приложениями), и пр.
Разработка GeoReader как программного комплекса была продолжена в 2019 году уже в рамках программы Старт (Фонд содействия инновациям), по итогу которой было разработано и зарегистрировано два приложения, составляющих сегодня важнейший функционал на базе ПО GeoReader - это "Приложение для автоматизированного поиска границ на радарограммах" и "Приложение для автоматического поиска структурных аномалий на радарограммах":


Тогда же реализована идея разделения программного комплекса на два блока - обработки одной радарограммы (GeoReader) и пакетной обработки всех файлов/радарограмм георадарного проекта (GeoReader Project)
В рамках НИОКР командой проекта была проведена масштабная работа по разработкам новых программных решений и тестированиям новых алгоритмов обработки данных
Приложение автоматизированного поиска границ на радарограмме (когда оператор задает начальную точке на первой георадарной трассе радарограммы и при необходимости корректирует работу алгоритма автопоиска) и полностью автоматический поиск структурных неоднородностей (аномалий) на радарограмме с применением технологии атрибутивного анализа (определение динамических параметров волновой картины, нацеленное на получение дополнительной информации о строении разреза) качественно дополнили программный комплекс GeoReader
Так, для построения максимально эффективного алгоритма, взятого за основу в "Приложении для автоматизированного поиска границ на радарограммах", было проработано четыре самых эффективных моделей определения границ:
- по экстремальным значениям (с наиболее оптимальными значениями настроек)
- алгоритм на основе взаимно-корреляционной функции
- по сходным цветам
- по равным фазам
Немного о ходе разработки и тестирования..
Сравнение разработанных алгоритмов выполнялось по двум критериям: быстродействию и устойчивости
Расчет времени работы выполнялся при поиске трех границ: отражения от металлического листа, отражения от поверхности асфальта для участка эксплуатируемой дороги и отражения от поверхности асфальта для участка новой дороги. Для каждого алгоритма определялось общее время, время выполнения подготовительной стадии и среднее время работы на одну георадиолокационную трассу
Анализ результатов расчетов показал, что наиболее быстрым алгоритмом является поиск границы по сходным цветам (не более 2 секунд в самом худшем случае). Использование алгоритмов по равным фазам и на основе взаимно-корреляционной функции представлялось вполне приемлемым: время работы в наихудшем случае не превышало 5 секунд. Однако использование алгоритма по экстремальным значениям оказалось неприемлемым: время работы в этом случае составляло до 2,5 минут
Критерий устойчивости алгоритма в данном контексте означает, сколько раз оператору необходимо вмешаться в процесс работы алгоритма с целью исправления сбоя в определении положения границы. Чем больше таких вмешательств, тем менее устойчив алгоритм. Это может произойти из-за четырех причин: остановки алгоритма поиска, пропуска алгоритмом участка радарограммы, найденному локальному выбросу на границе, который необходимо исправлять и переходу на другую ось синфазности
Расчет выполнялся при поиске двух границ на участке эксплуатируемой автомобильной дороги (отражения от поверхности асфальта и от первого асфальтобетонного слоя) и при поиске четырех границ на участке новой автомобильной дороги (отражения от поверхности асфальта, подошвы асфальтобетона, слоя из щебеночной смеси и песка)
Результаты расчета показали, что для новой автомобильной дороги с хорошо выделяющимися слоями все алгоритмы достаточно устойчивы. Алгоритм по равным фазам показал себя предпочтительнее, т.к. при работе с ним проявляются только переходы на другую ось синфазности, других нарушений выявлено не было. Однако для эксплуатируемой автомобильной дороги, где слои проявляются не так явно, использовать алгоритмы по экстремальным значениям или на основе взаимно-корреляционной функции оказалось неприемлемо: количество вмешательств оператора в этом случае исчислялось десятками и сотнями. В данном случае алгоритм поиска по равным фазам также оказался более предпочтительнее алгоритма поиска по сходным цветам: для него почти не наблюдалось других дефектов кроме перехода на другую ось синфазности
Также была выполнена проверка на адекватность полученных результатов. Все алгоритмы на участках, где не было пропусков, локальных выбросов или переходов на другую ось синфазности, работали адекватно: граница строилась примерно там же, где бы её провёл оператор вручную
Таким образом, комплексное сравнение разработанных алгоритмов полуавтоматического поиска границ ясно показало, что наиболее оптимальным является алгоритм поиска границ по равным фазам. В большинстве случаев также можно пользоваться алгоритмом поиска по сходным цветам при условии корректной настройки контрастности радарограммы в начале работы. Алгоритм поиска на основе взаимно-корреляционной функции был отклонён: несмотря на приемлемое время работы, в ряде случаев (например, на эксплуатируемой автомобильной дороге) он приводит к большому количеству сбоев, требует частого вмешательства оператора. И, наконец, алгоритм поиска по экстремальным значениям был отклонен категорически, исходя и из времени работы, и из качества получаемых результатов
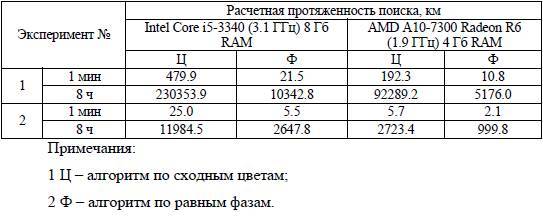
На основании анализа результатов сравнения алгоритмов по критерию быстродействия, для наиболее перспективных алгоритмов по сходным цветам и равным фазам были рассчитаны данные о возможной протяженности границы, которая может быть автоматизировано найдена посредством их применения за 1 минуту и рабочую смену (8 часов непрерывной работы) при шаге сканирования 0,3 м
В рамках выполненного второго этапа НИОКР были проанализированы основные подходы автоматизированного поиска структурных аномалий на георадарных профилях. Анализ показал, что наиболее реализуемым является использование алгоритмов атрибутного анализа
Перспективными также выделены направления по определению местоположения структурных аномалий методом общей глубинной точки, создание алгоритмов по технологии глубокого обучения с целью автоматической классификации дефектов, обнаруженных по результатам поиска структурных аномалий
В ходе выполнения экспериментальной части было установлено, что:
1. Автоматические алгоритмы атрибутного анализа по количественному изменению атрибутов способны обнаруживать зоны структурных аномалий, видимые и человеческому глазу. Вместе с тем, машинное зрение позволяет увидеть большее количество структурных аномалий по сравнению с экспертом
2. Для обнаружения пустоты и переувлажнения на основании выполненных экспериментальных работ наиболее показательным является процедура текстурного анализа «Мера однородности»
3. Для обнаружения просадок на основании выполненных экспериментальных работ наиболее показательным является процедура текстурного анализа «Мера контраста»
4. Для обнаружения ослаблений грунта различного характера на основании выполненных экспериментальных работ применимы большинство процедур атрибутного анализа
Вместе с этим, в ходе НИОКР отмечено, что проведение работ с георадаром в каждом конкретном месте может быть неповторимым, так как результат полевой съемки и камеральной обработки зависит во многом как от погодно-климатических условий местности и физического состава обследуемой среды, так и применяемых средств сбора и обработки данных, в том числе настроек георадара и применяемых функций программного обеспечения
В рамках 3 этапа НИОКР установлено, что на момент окончания НИОКР максимальная расчетная производительность автоматизированных алгоритмов поиска границ слоев дорожных одежд составила 76,46 км погонного георадарного профиля за смену, а максимальная расчетная производительность автоматизированных алгоритмов поиска структурных аномалий дорожных одежд составила 72,58 км погонного георадарного профиля за смену